Arduino IDE及编程语法
一、简介
Arduino语法是建立在C/C++基础上的,其实也就是基础的C语法,Arduino语法只不过把相关的一些参数设置都函数化。
Arduino板通过串行通信的方式与Arduino IDE通信,实现串口数据的发送接收。从Arduino IDE向Arduino板烧录程序(Arduino IDE中称为上传),即将编译好的二进制程序代码写入ATmega单片机的程序存储器,这一过程也是通过串行通信实现的。因此,在使用Arduino之前必须确保串行通信的正常工作。由于当前多数电脑均不再配置对外的串行通信接口,所以采用USB转串口(TTL电平)的方式来实现。
Arduino所采用的USB转串口的方式主要有两种:一是采用专用芯片(Arduino官方采用的主要是FT232RL),一是采用内置转换功能的单片机(如ATmage 16U2等),其中NANO采用的是前者,UNO采用的是后者。不论采用哪一种方式,必须正确安装相应芯片的驱动程序,才能确保其与Arduino IDE正常通信。
官网地址:https://www.arduino.cc/en/Guide
二、设置
0、(可选)安装驱动
CH34X串口转USB芯片驱动:https://www.wch.cn/download/CH341SER_EXE.html
1、示例程序
Arduino IDE的文件-示例菜单中包含了大量实例程序,这是学习Arduino编程开发的宝贵资源,值得我们充分利用。另外,添加了标准格式的Arduino库之后,也会在这个菜单项里找到库所带的示例程序。
这些示例程序也是我们进行各种测试的便捷工具。在安装完成IDE后,通常我们会打开文件-示例Basics-Blink项目来进行编译和上传程序的测试。
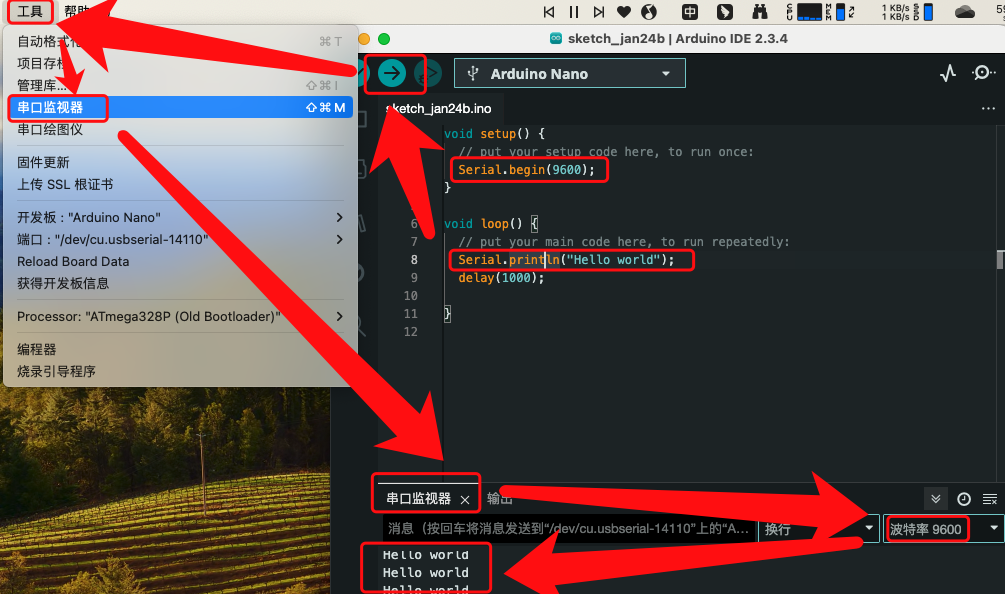
Basic / Blink,该程序功能是让Arduino板载的LED灯(连接Arduino 13号GPIO)进行频率为0.5Hz的闪烁(亮灭各1S循环往复),可以检测编译、上传(烧录)以及Arduino板的电路运行是否正常。Communications / ASCII Table,该程序功能是系统上电后通过串口以9600bps波特率输出ASCII码表,可以验证串口通信功能。
示例程序文档地址:https://docs.arduino.cc/built-in-examples
2、设置
正确上传(烧录)程序需要进行的三项设置:工具菜单,分别设定开发板、处理器和端口三个项目。
开发板设置:按照所使用的Arduino板的型号名称进行设置
常用的Arduino UNO选择
Arduino/Genuino UNO,Arduino NANO选择Arduino NANO。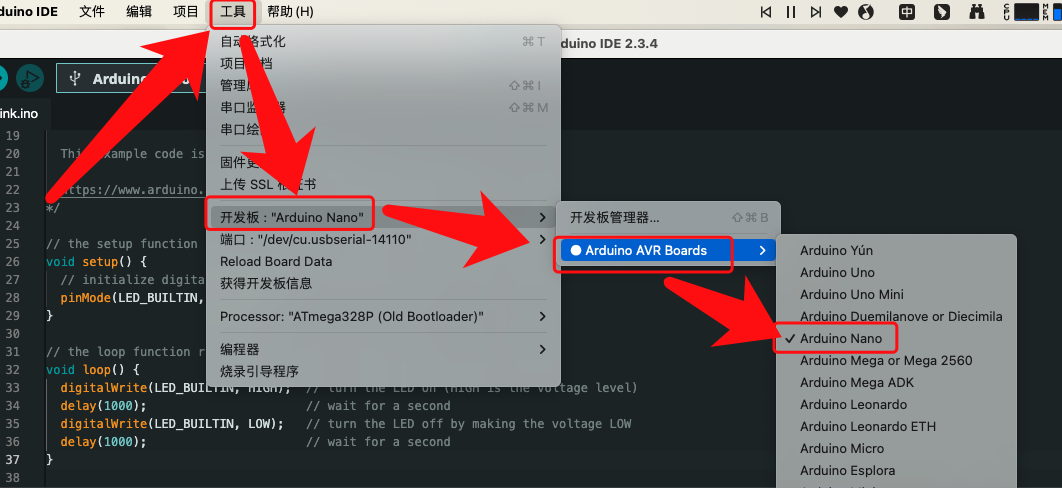
处理器设置:选择开发板对应的Atmega单片机型号
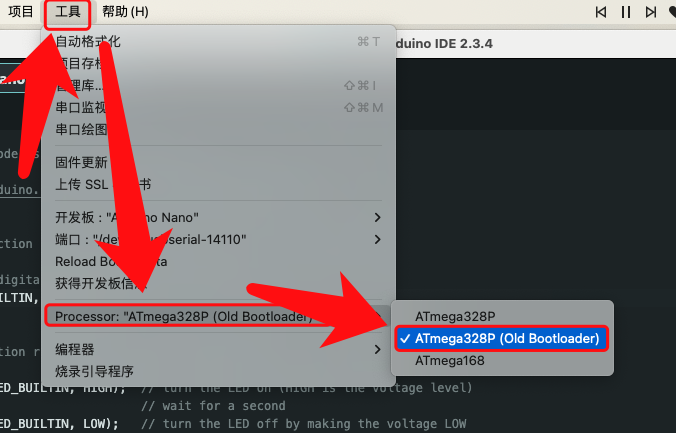
需要注意的是
- 对于Arduino NANO,Arduino官方于2018年1月更新了Bootloader代码,而早期及非官方版本的Arduino NANO有些仍然采用老版本的Bootloader代码,因此必须特别注意选择
ATmega328P (Old Bootloader),否则会出现上传代码时长时间停留在上传……经一段时间后提示上传失败的现象。对于2018年1月后官方版的NANO,选择ATmega328P。对任何版本的UNO,由于没有更新Bootloader,因此没有ATmega328P (Old Bootloader)这一选项,选择ATmega328P即可。 - 如果使用内置新Bootloader的NANO,但Arduino IDE却是老版本(如1.8.4),则需要升级到新版本,否则也会因为Bootloader不匹配而导致上述故障。
- 对于Arduino NANO,Arduino官方于2018年1月更新了Bootloader代码,而早期及非官方版本的Arduino NANO有些仍然采用老版本的Bootloader代码,因此必须特别注意选择
端口设置
注意选择当前Arduino板连接的COM端口号
正确设置以上参数后,单击工具栏上的右向箭头图标即可完成“编译+上传”的过程,也可以使用菜单项目-上传。工具栏上的对号图标是仅编译,与菜单项目-验证/编译功能一致。以上是使用Arduino板载USB口上传程序时使用的,若使用其他编程器进行上传,则需首先在工具-编程器菜单中选择对应型号的编程器,在确保编程器与Arduino板正确连接的情况下,使用项目-使用编程器上传来上传程序。
3、串口监控
三、电路常识
1、数字电平
Arduino Uno的引脚0-13用作数字输入/输出引脚。其中,引脚13连接到板载的LED指示灯;引脚3、5、6、9、10、11具有PWM功能
需要注意的是:
● 每个引脚可提供/接收最高40 mA的电流。但推荐的电流是20毫安。
● 所有引脚提供的绝对最大电流为200mA。
数字是一种表示1位电压的方式:0或1。
Arduino上的数字引脚是根据用户需求设计为输入或输出的引脚。数字引脚可以打开或关闭。开启时,它们处于5V的高电平状态,当关闭时,它们处于0V的低电平状态。在Arduino上,
当数字引脚配置为
输出时,它们设置为0或5V当数字引脚配置为
输入时,电压由外部设备提供。该电压可以在0-5V之间变化,并转换成数字表示(0或1)。为了确定这一点,有2个阈值:- 低于0.8v - 视为0
- 高于2.0v - 视为1
将组件连接到数字引脚时,确保逻辑电平匹配。如果电压在阈值之间,则返回值将不确定。
2、PWM
通常,脉宽调制(PWM)是一种调制技术,用于将消息编码为脉冲信号。 PWM由两个关键部分组成:频率和占空比。 PWM频率决定了完成单个周期(周期)所需的时间以及信号从高到低的波动速度。占空比决定信号在总时间段内保持高电平的时间。占空比以百分比表示。
在Arduino中,支持PWM的引脚产生约500Hz的恒定频率,而占空比根据用户设置的参数而变化。见下图:
四、编程语法
文档地址:https://docs.arduino.cc/language-reference/
1、变量及常量
HIGH | LOW表示数字IO口的电平,HIGH 表示高电平(1),LOW 表示低电平(0)。INPUT | OUTPUT表示数字IO引脚(Digital pins)的方向,INPUT 表示输入(高阻态),OUTPUT 表示(AVR单片机能提供5V电压,40mA输出)。输入还有INPUT_PULLUPtrue | false逻辑层定义integer constants整数常量floating point constants浮点常量
2、结构
初始函数
setup() 初始化,只执行一次。
当Arduino板起动时setup()函数会被调用。用它来初始化变量,引脚模式,开始使用某个库,等等。该函数在Arduino板的每次上电和复位时只运行一次。
loop() 循环执行体,无限循环
在创建setup函数,该函数初始化和设置初始值,loop()函数所做事的正如其名,连续循环,允许你的程序改变状态和响应事件。可以用它来实时控制arduino板。
控制结构
- if 如果,满足条件执行
- if...else 如果,,,否则
- for 有限循环体,变量,条件,步进
- switch case 多项判断,case 值: break终止,default:条件之外的部分
- while 满足条件执行循环
- do... while 先执行后判断条件
- break 跳出,用在for和while,switch中
- continue 继续下一循环,不跳出循环体,跳出当前条件
- return 返回,跳出循环,后面的代码是无法执行的。
- goto 定向跳转,用的较少
算数运算符
- =(赋值运算符)
- +(加)
- -(减)
- *(乘)
- /(除)
- %(模)取余
比较运算符
- ==(等于)
- !=(不等于)
- <(小于)
- >(大于)
- \<=(小于等于)
- >=(大于等于)
布尔运算符
&&(与) 条件同时满足
||(或) 条件只要满足一个
!(非) 取反,布尔型或=号时用
指针运算符
取消引用运算符
& 引用运算符
位运算符
& (bitwise and)
| (bitwise or)
^ (bitwise xor)
~ (bitwise not)
<< (bitshift left)
>> (bitshift right)
复合运算符
++ (increment)
-- (decrement)
+= (compound addition)
-= (compound subtraction)
*= (compound multiplication)
/= (compound division)
&= (compound bitwise and)
|= (compound bitwise or)
3、函数
数字I/O
- digitalWrite(uint8_t pin, uint8_t value) :写数字引脚, 对应引脚的高低电平. 在写引脚之前, 需要将引脚设置为OUTPUT模式,pin值为
0~13,value为HIGH或LOW- 模拟引脚也可以当作数字引脚使用, 编号为14(对应模拟引脚0)到19(对应模拟引脚5).
digitalRead(uint8_t pin):读数字引脚, 返回引脚的高低电平. 在读引脚之前, 需要将引脚设置为INPUT模式,pin值为
0~13。比如可以读数字传感器- 如果引脚没有链接到任何地方, 那么将随机返回 HIGH 或 LOW.
pinMode(uint8_t pin, uint8_t mode):配置引脚为输入或输出模式,pin为引脚编号,值为
0~13, mode表示为INPUT、OUTPUT或INPUT_PULLUP。- 模拟引脚也可以当作数字引脚使用, 编号为14(对应模拟引脚0)到19(对应模拟引脚5).
数学
abs(x):计算绝对值
constrain(x, a, b)):约束函数,下限a,上限b,x必须在ab之间才能返回。
map(value, fromLow, fromHigh, toLow, toHigh) : 约束函数,value必须在fromLow与toLow之间和fromHigh与toHigh之间。
max(x, y):求最大值
min(x, y):求最小值
pow(base, exponent):开方函数,base的exponent次方
sq(x):平方
sqrt(x):开根号
位与字节操作
bit():
bitClear():
bitRead():
bitSet():
bitWrite():
highByte():
lowByte():
模拟I/O
- analogRead(pin): 模拟IO口读函数,pin表示为
0~5。比如可以读模拟传感器(10位AD,0~5V表示为0~1023)。 analogWrite(pin, value): PWM 数字IO口PWM输出函数,Arduino数字IO口 标注了PWM的IO口可使用该函数,pin表示
3, 5, 6, 9, 10, 11,value表示为0~255。analogWriteResolution():
analogReadResolution():
analogReference(): : 默认5V.
INTERNAL: 低功耗模式. ATmega168和ATmega8对应1.1V到2.56V. EXTERNAL: 扩展模式. 通过AREF引脚获取参考电压.
三角函数
cos():
sin():
tan():
外部中断
attachInterrupt():
detachInterrupt():
digitalPinToInterrupt():
高级 I/O
noTone():
pulseIn():
pulseInLong():
shiftIn():
shiftOut():
tone():
Characters
isAlpha():
isAlphaNumeric():
isAscii():
isControl():
isDigit():
isGraph():
isHexadecimalDigit():
isLowerCase():
isPrintable():
isPunct():
isSpace():
isUpperCase():
isWhitespace():
中断
interrupts():
noInterrupts():
时间
delay():延时函数(单位ms)
delayMicroseconds() :延时函数(单位us)
micros():
millis():
随机数
random():
randomSeed():
通信
SPI:
Print:
Serial:
Stream:
Wire:
USB
Keyboard:
Mouse:
Wi-Fi
Wi-Fi Overview:
WiFi Network:
IPAddress:
WiFiClient:
WiFiServer:
WiFiUDP: